HTV[宇宙ステーション補給機]/こうのとりを語る。
HTV[宇宙ステーション補給機]とは
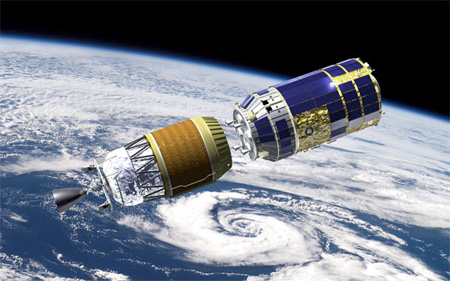
HTVは、国際宇宙ステーション[ISS]へ補給物資を運ぶための無人の輸送機だ。
日本が開発・運用する。
全長約10メートル、最大直径4.4メートルの巨大な宇宙船で、質量(重さ)は約10.5トンもある。
こうのとりの愛称で呼ばれている。
![HTV[宇宙ステーション補給機]](http://iss.jaxa.jp/htv/images/htv.jpg)
HTV
宇宙航空研究開発機構(JAXA)提供
国際宇宙ステーションには常時6名が滞在する。
当然、食糧や衣類、研究物資の補給が必要になる。
HTV(こうのとり)は、補給専用の輸送システムなのである。
HTV(こうのとり)は最大6トンの物資を国際宇宙ステーション[ISS]に輸送する能力を持つ。
補給後は、国際宇宙ステーション[ISS]で発生したゴミを積載して大気圏へ再突入し完全に燃焼する。
ESAのATVと同様の機能は似ている。
国際宇宙ステーション[ISS]への無人輸送機には、HTVの他にプログレス、ATVがある。
これらは国際宇宙ステーション[ISS]の内部、つまり空気のあるところで使用される物資を専門に補給する。
外部用、つまり真空中で使用される物資は補給できないのだ。
これに対しHTVは国際宇宙ステーション[ISS]の内部用の物資だけでなく、外部用、つまり真空中で使用される物資も補給可能である。
一方で、HTVはISSをリブーストすることはできない。
国際宇宙ステーション[ISS]は高度約400キロメートルの熱圏内を飛ぶ。
ここには、ごく薄いながらも空気があり、ISSにとって抵抗になっている。
この影響でISSは徐々に高度を下げていく。
このまま放置しておくと、ISSは大気圏内へ落下してしまう。
これを防止するためには、時々ジェット噴射でISSを上昇させ元の高度にもどす必要がある。
この作業がリブーストだ。
ブーストはスペースシャトル、プログレス、ATVがISSにドッキングした際に実施する。
HTVはISSの外部ペイロードを持つことと引き換えにリブーストの機能を見送ったのだ。
HTVは、H-IIBロケットで打ち上げる。
HTVの構造
HTVは、次のブロックから構成されている。
- 補給キャリア与圧部
- 補給キャリア非与圧部
- 曝露パレット
- 電気モジュール
- 推進モジュール
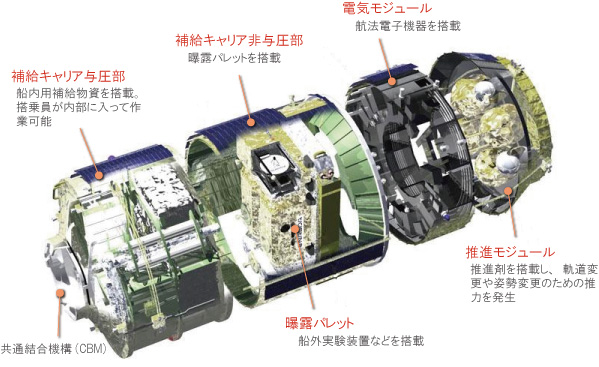
補給キャリア与圧部
補給キャリア与圧部は、1気圧の空気に満たされたブロックである。
国際宇宙ステーション内部で使用される補給品(食糧、飲料水)を格納する。
HTVの先端には国際宇宙ステーションとドッキングするための共通結合機構[CBM]が設置されている。
HTVがドッキングすると、クルーが共通結合機構[CBM]を通って補給キャリア与圧部内部に入り補給品を搬出する。
補給キャリア非与圧部
外部用の物資(船外実験装置、バッテリ)を積載するのが、補給キャリア非与圧部だ。
HTVが宇宙に出ると、ここは真空になる。
物資は直接補給キャリア非与圧部に積載されるのではなく、曝露パレットの上に乗せられる。
曝露パレット
「きぼう」の船外実験装置を運搬するI型、ISS共通の船外機器(バッテリ)を運搬するIII型の二種類がある。
電気モジュール
誘導、通信、電力などの制御システムを集約した部分が電気モジュールだ。
HTVの頭脳であり神経系でもある。
HTVは地上からの指令に従って誘導されるが、場合によっては自律的に推進する。
推進モジュール
HTVを推進させるシステムが推進モジュールである。
軌道の変更や姿勢制御は推進モジュールによって行われるのだ。
HTVには合計32基のスラスタと4基の推進剤タンクが装備されている。
これらをコントロールするのが推進モジュールだ。
HTVのミッション
HTVの打ち上げからドッキングまで
HTVは種子島宇宙センターからH-IIBロケットで打ち上げられる。
H-IIBロケットの第2段からの分離後、HTVは筑波宇宙センター内のHTV管制センター[TKSC]との通信で制御される。
同時にTDRS(NASAのデータ中継衛星)とも通信を確立する。
H-IIBロケットの2段目からHTVが分離された瞬間。
宇宙航空研究開発機構(JAXA)提供
HTVはGPSで自分の位置を確認しながら、推進モジュールを使ってISSを目指す。
ISSに23キロメートルの距離まで接近すると、そこで一度停止する。
ここまでの工程は、約3日だ。
23キロメートルという距離には意味がある。
ISSとHTVが直接通信が可能となる距離が23キロメートルなのだ。
この距離内に入ると、HTVとISSの両者で近傍域通信システム[PROX]が起動する。
GPS信号とPROXで通信を行いながらHTVはISSに近づき、ISSの後方約7キロメートルの地点に相対距離を保ったまま静止する。
ここからHTVは、ISSの下方(低空側)から低速でISSに300メートルまで接近する。
ここからレーザーレーダ[RVS]を使用する。
レーザーは「きぼう」に設置されたリフレクタで反射すため、ISSとの距離が精密に測定できるのだ。
これをランデブセンサ航法という。
ランデブセンサ航法の接近速度は1分間に1〜10メートルだ。
ISS内のクルーは、一時停止や後退、接近中止などのコマンドをマニュアルで送信することができる。
ランデブセンサ航法によって最終的に、HTVはISSの下方10メートル付近で停止する。
HTVが停止すると、いよいよロボットアーム[SSRMS]が登場する。
ロボットアームはHTVを掴み、第2結合部ハーモニーのCBM(共通結合機構)にドッキングする。
ロボットアームでHTVをキャッチするためには、HTVのグリップ部を1立方メートルの空間内に5分以上滞留させる必要がある。
この方式は非常に高度な制御技術が要求されるため、今までの宇宙機では実用化されていない。
ロボットアームによるドッキングは世界初の技術なのだ。
この方式をHTVが実用化したメリットは大きい。
ドッキング部に直結した貨物区画(補給キャリア与圧部)の開口部を広くすることができる。
このため大サイズの物資の搬入出が可能となり、製造コストを下げることも可能となる。
ドッキング後、ハッチを開いてHTVの補給キャリア与圧部からISSへ搬出する。
補給キャリア与圧部が空になると、今度はISS内で発生したゴミを搬入する。
補給キャリア非与圧部からは、ロボットアームで曝露パレットが引き出され、船外用補給品が移動される。

ロボットアームがHTVから曝露パレットを引き出している様子。
宇宙航空研究開発機構(JAXA)提供
HTVの分離と大気圏突入
ISSから分離されたHTVは南太平洋上の大気圏に再突入する。
このとき発生する熱でHTVはほぼ完全に消滅する。
なお、運用上の都合でインド洋上空に再突入するケースも想定されている。
HTV[宇宙ステーション補給機]のミッション
HTV-1/こうのとり1号機
HTVの一号機HTV-1が、2009年9月11日にH-IIBロケット1号機によって打ち上げられ、9月18日にISSとのドッキングを果たした。
補給キャリア与圧部には、ISPR1基(NASA実験装置)とHRR7基が、
補給キャリア非与圧部には、超伝導サブミリ波リム放射サウンダ[SMILES]と、HREP(NASA実験装置)が搭載されている。
HTV-2/こうのとり2号機
HTV-2/こうのとり2号機は、2011年1月22日H-IIBロケット2号機によって打ち上げられ、2011年3月30日に大気圏に再突入した。
HTV-3/こうのとり3号機
HTV-3/こうのとり3号機は、2012年7月21日H-IIBロケット3号機によって打ち上げられ、2012年9月14日に大気圏に再突入した。
HTV-4/こうのとり4号機
HTV-4/こうのとり4号機は、2013年8月4日H-IIBロケット4号機によって打ち上げられ、2013年9月7日に大気圏に再突入した。
3号機までは、JAXAが打ち上げを主導したが、4号機からは三菱重工業が打ち上げを担当するようになった。
スポンサーリンク
参考文献・サイト
JAXA:新たな展開を迎える日本の宇宙輸送
JAXA:宇宙ステーション・きぼう広報・情報センター
2009/01/25
2009/03/20
2014/10/04